Jugend forscht 1983
Fachgebiet Physik
Ein neuartiges Verfahren zur Bestimmung der Periodendauer des mathematischen Pendels bei großen Amplituden und die Diskussion zur Anwendbarkeit auf andere ausgesuchte Schwingungen der Ebene
Erarbeitet von
Boris Haase (18),
Theodor-Heuss-Gymnasium zu Göttingen
Kurzfassung der vorliegenden Arbeit
Die Schwingungsdauer von Massenpunkten auf gekrümmten Schwingungsbahnen in der senkrechten Ebene – wie z. B. des mathematischen Pendels und des Zykloidenpendels – soll in der vorliegenden Arbeit auf einfachere Weise berechnet werden als bisher.
Die meisten dieser Schwingungsdauern sind bei größerer Entfernung des Massenpunktes auf der Schwingungsbahn von der Ruhelage, deren tiefstem Punkt, von dieser Entfernung abhängig, was die Berechnung im Allgemeinen erschwert.
Um eine von dieser Entfernung, der Amplitude, unabhängige Periodendauer berechnen zu können, muss man außer der Masse nur die Direktionsgröße kennen, dem Quotienten aus rücktreibender Kraft und dem dazugehörigen Auslenkungs- bzw. Direktionsweg.
Diese Kenntnis wird in dieser Arbeit auf die von ihrer Amplitude abhängigen Schwingungsdauern erweitert und angewandt.
Hierbei ergeben sich zu den herkömmlichen Methoden teilweise Differenzen – am Beispiel des mathematischen Pendels bis höchstens ein Prozent bei 90° Auslenkung -, teilweise wie am Beispiel des Zykloidenpendels jedoch nicht. Zum ebenfalls bearbeiteten Ellipsenpendel konnten keine Literatur-Angaben gefunden werden.
Im experimentellen Teil konnte die errechnete Periodendauer für das mathematische Pendel mit Rücksicht auf die Fehlerquellen und die Messgenauigkeit bestätigt werden.
Der Verfasser kommt zu dem Schluss, dass das eigenständig entwickelte Verfahren durchaus zur Anwendung in der Physik kommen könnte.
Inhaltsverzeichnis
|
1. |
Einleitung |
|
2. |
Hauptteil |
|
2.2. |
Versuch zum mathematischen Pendel |
|
2.3. |
Fehlerrechnungen |
|
2.4. |
Diskussion |
|
3. |
Schluss |
|
4. |
Anhang |
|
5. |
Literaturverzeichnis |
1. Einleitung
1.1. Anlass und Grundgedanke
Die Periodendauer des mathematischen Pendels bei großen Ausschlägen ist bisher über recht schwierige Verfahren der Infinitesimalrechnung und Reihenentwicklung ermittelt worden. Das in der vorliegenden Arbeit entwickelte neue Verfahren zur Bestimmung der Periodendauern für ausgesuchte Schwingungen der Ebene soll den Rechenweg einerseits vereinfachen aber auch in Bezug auf seine Genauigkeit an zwei Beispielen mit dem alten Verfahren verglichen werden.
Grundgedanke ist die zeitgleiche Simulation der jeweiligen Pendelschwingung durch eine geradlinige harmonische Schwingung (Federpendel, Oszillator).
1.2. Voraussetzungen
Alle ausgesuchten Schwingungen gehen von einem Massenpunkt aus, der in der senkrechten Ebene an einem masselosen Faden um einen festen Punkt schwingen soll.
Der Pendelfaden darf hierbei – von der Ruhelage aus gesehen – höchstens um 90° ausgelenkt werden, da die maximal rücktreibende Kraft in der Ausgangshöhe liegen muss, in welcher keine Zusatzbeschleunigung auftreten soll.
Um einen freien Fall zu verhindern, müssten sonst Stangen statt Fäden verwendet werden, welche aber nicht (wie notwendig) an Evoluten der Schwingungsbahnen angeschmiegt werden könnten. Trotz der Anschmiegung wird zur Vereinfachung die Länge des Pendels in Ruhelage angenommen.
Der Krümmungsradius der Schwingungsbahn muss von der Ruhelage aus entweder konstant bleiben oder sich stetig verringern, damit ebenfalls ein freier Fall verhindert wird.
Reibungs- und Dämpfungserscheinungen sollen vernachlässigt werden.
Anderenfalls sind weitere Berechnungen für die Periodendauer notwendig, die aber den Rahmen dieser Arbeit sprengen würden.
2. Hauptteil
2.1. Theoretische Lösung des Problems
2.1.1. Allgemeine Lösung
Die Periodendauer einer harmonischen Schwingung ist gegeben durch:\[(a)\;T = 2\pi \sqrt {{\textstyle{m \over D}}}.\]Nach dem Energieerhaltungssatz gilt:\[(b)\;\tfrac{1}{2} m v^{2} = \tfrac{1}{2} D s^{2} = m g h\].Bei einer Schwingung bilden die Lageenergie \(W_{pot}\) und die Bewegungsenergie \(W_{kin}\) die konstante Summe:\[(c)\;W_{pot} + W_{kin} = W_{pot_{0}}.\]\(W_{pot_{0}}\) soll nun durch die Spannenergie \(W_{Sp}\) ausgedrückt werden, um eine von der Amplitude abhängige Direktionsgröße \(D(\varphi_{0})\) zu ermitteln. \(D(\varphi_{0})\) soll dann in die Formel (a) zur Ermittlung der Periodendauer eingesetzt werden.
Dazu ist eine Ersatzbewegung der Masse \(m\) durch die Kraft \(F\) auf dem Direktionsweg \(s\) notwendig. Es gilt:\[(d)\;D = F/s \text{ (Hookesches Gesetz) und}\]\[{\rm{(e)}}\;{\rm{F}}\, = \,{\rm{m}}\,{\rm{a}} = \,{\rm{m}}\,{\rm{l}}\,\ddot \varphi \,\,\left( {{\text{Newton}}} \right).\]Im Weiteren wird immer wieder auf die Direktionsgröße \(D\) des ebenen Fadenpendels bei minimaler Amplitude zurückgegriffen. Hierbei gilt für die rücktreibende und zur Schwingungsbahn tangentiale Kraft \(F_{R}\), da die Normalkraft durch die Spannkraft des Fadens aufgehoben wird (1, 2):\[{\rm{(f)}}\;{{\rm{F}}_{\rm{R}}} = \,{\rm{m}}\,{\rm{g}}\,{\rm{sin}}\,\varphi = \, – m\,l\,\ddot \varphi .\]Daraus folgt:\[(g)\;\ddot \varphi \, = \,\,{\rm{sin}}\,\varphi \,{\textstyle{g \over l}}.\]Für kleinste Ausschlagswinkel \(\varphi\) kann \(sin(\varphi)\) durch \(\varphi\) ersetzt werden, und es gelten die Bedingungen für die harmonische Schwingung. Daher ist:\[(h)\;\ddot \varphi \, = {\omega ^2}\,\varphi \]und aus (g) folgt:\[(i)\;\omega = \sqrt {{\textstyle{g \over l}}.} \]Somit gilt:\[(j)\;D = m\,{\omega ^2} = m\,{\textstyle{g \over l}}.\]Für größere Amplituden muss sich die Direktionsgröße \(D\) aus dem Produkt der Direktionsgröße für die harmonische Schwingung mit einem die unharmonische Schwingung bestimmenden Funktionswert \(f(\varphi_{0})\) des Ausschlagswinkels \(\varphi\) zusammensetzen.
Man schreibt:\[(k)\;D({\varphi _0}) = \left( {m{\textstyle{g \over l}}} \right)\,f({\varphi _0}).\]Der Funktionswert \(f(\varphi_{0})\) ist jedoch für die harmonische Bedingung des Energiesatzes nicht definiert, sodass er sich bei einer Einführung herausheben muss. Mit \(s = x l\) gilt:\[(l)\;\frac{1}{2}\frac{{\frac{{f({\varphi _0})mxg}}{{xl}}{{(xl)}^2}}}{{f({\varphi _0})}} = m\,g\,h.\]Hiermit kann der sich nicht ändernde Direktionsweg \(s\) über den Energiesatz berechnet werden, wenn man den Funktionswert \(f(\varphi_{0})\) der rücktreibenden Kraft \(F_{R}\) zuordnet. Mit\[{\textstyle{1 \over 2}}\left( {m{\textstyle{g \over l}}} \right){s^2} = m\,g\,h\]ergibt sich für den Direktionsweg:\[(m)\;s = \sqrt {2lh} .\]Die rücktreibende Kraft \(F_{R}\) muss also unabhängig vom Energiesatz entwickelt werden. Sie ist vielmehr durch die Ausgangsschwingung als die in der Ausgangshöhe der Schwingungsbahn tangential angreifende und somit maximal rücktreibende Kraft festgelegt. Aus\[(n)\;F_{R} = (-) m a\]erhält man mit (a) und (d) die Periodendauer:\[(o)\;T = 2\pi \sqrt {\frac{{\sqrt {2lh} }}{a}} .\]Anschaulich stellt der Direktionsweg \(s\) mit (m) die Sehne eines Kreises mit dem Radius \(l\) dar. Da dieser Kreis Krümmungskreis für die Ruhelage der Schwingungsbahn ist, muss diese Sehne von einem Kreisbahnpunkt in der Ausgangshöhe \(h\) zur Ruhelage führen.
Die einfachste Form einer Schwingungsbahn, die sich mit dem Krümmungskreis deckt und eine punktförmige Evolute besitzt, ist die des mathematischen Pendels (Abb. 1). Dieses soll darum zuerst behandelt werden.
2.1.2. Das mathematische Pendel
Aus Abb. 1 erhält man für den Direktionsweg \(s\):\[s = 2\sin \left( {{\textstyle{{{\varphi _0}} \over 2}}} \right)l.\]Mit (f) gilt für die maximal rücktreibende Kraft \(F_{R}\):\[F_{R} = (-) m g\, \text{sin}(\varphi_{0}).\]Die Periodendauer ist mit (a) und (d) daher:\[T = 2\pi \sqrt {\frac{l}{{\cos \left( {{\textstyle{{{\varphi _0}} \over 2}}} \right)g}}.} \]
2.1.3. Das Zykloidenpendel
Für die gemeine Zykloide (Abb. 2) gilt die Parametergleichung (2):\[x = a (\Phi – \text{sin}(\Phi)) \text{ und } y = a (\text{cos}(\Phi) – 1).\]Für den Krümmungsradius \(\rho\) erhält man:\[\rho = 4a\sin \left( {{\textstyle{\phi \over 2}}} \right).\]Da die Winkel \(\Phi\) von der Ausgangshöhe \(h\) zur Ruhelage bei \(\Phi = \pi\) zunehmen bzw. der Sinus von \(\Phi/2\) nach Überschreiten der Ruhelage zum Umkehrpunkt wieder abnimmt, sind die Voraussetzungen für die Berechnung der Periodendauer erfüllt.
Die Ausgangshöhe ist:\[h = 2 a + y = a (\text{cos}(\Phi_{0}) + 1).\]Setzt man \(h\) in (m) ein, gilt mit \(l = 4 a\):\[s = l\sqrt {{\textstyle{{\cos \,{\phi _0} + 1} \over 2}}} = \cos \left( {{\textstyle{{{\phi _0}} \over 2}}} \right)l.\]Da die Tangentialbeschleunigung \(b_{t}\) stets senkrecht zum Krümmungsradius \(\rho\) wirkt, erhält man für sie:\[{b_t} = \alpha \cos \left( {{\textstyle{{{\phi _0}} \over 2}}} \right)g.\]Wenn \(\Phi_{0} = 0\) ist, dann ist \(b_{t} = g\), wenn \(\Phi_{0} = \pi\) ist, dann ist \(b_{t} = 0\). Daher muss der Multiplikator \(\alpha = 1\) sein und gelten:\[{b_t} = \cos \left( {{\textstyle{{{\phi _0}} \over 2}}} \right)g.\]Mit (o) ergibt sich schließlich für die Periodendauer:\[T = 2\pi \sqrt {{\textstyle{l \over g}}} .\]Dieses wurde durch Huygens schon Jahrhunderte vorher bewiesen.
2.1.4. Das Ellipsenpendel
Für die Ellipse (Abb. 3) gilt die Parametergleichung (3):\[\frac{{{x^2}}}{{{a^2}}} + \frac{{{y^2}}}{{{b^2}}} = 1.\]Für den Krümmungsradius \(\rho\) ergibt sich nach Differentiation (siehe Anhang):\[\rho = \frac{{\left({{{a^4} – {a^2}{x^2} + {b^2}{x^2}}}\right)}^{\tfrac{3}{2}}}{{{a^4}b}}.\]Von der Ruhelage mit \(x = 0\) zu den Umkehrpunkten hin nimmt \(x\) zu, und da \(a^{2} x^{2} > b^{2} x^{2}\) ist, verringert sich der Krümmungsradius stetig. In der Ruhelage ist \(\rho\) daher:\[\rho = l = \frac{{{a^2}}}{b}.\]Mit\[y = – b\sqrt {1 – \frac{{{x^2}}}{{{a^2}}}} \]ist die Ausgangshöhe \(h\):\[h = b + y = b\left( {1 – \sqrt {1 – \frac{{{x^2}}}{{{a^2}}}} } \right).\]Mit (m) ergibt sich daher für den Direktionsweg \(s\):\[s = \sqrt {2a\left( {a – \sqrt {{a^2} – {x^2}} } \right)} .\]Damit ist der Direktionsweg unabhängig von der kleinen Halbachse der Ellipse.
Die Tangentialbeschleunigung \(b_{t}\) ist (nach Abb. 3):\[{b_t} = \cos \,\beta \,g = \frac{{bxg}}{{\sqrt {{a^4} – {a^2}{x^2} + {b^2}{x^2}} }}.\]Mit (o) erhält man für die Periodendauer:\[T = 2\pi \sqrt {\frac{{\sqrt {{a^4} – {a^2}{x^2} + {b^2}{x^2}} \sqrt {2a\left( {a – \sqrt {{a^2} – {x^2}} } \right)} }}{{bxg}}} .\]Für \(x = 0\) ist die Periodendauer zwar nicht definiert, für sehr kleine \(x\) gilt jedoch:\[T = 2\pi \sqrt {\frac{{{a^2}}}{{bg}}} = 2\pi \sqrt {\frac{l}{g}} .\]Für \(x = a\) ergibt sich der Satz:
Die Schwingungsdauer auf einer Ellipse bei maximalem Ausschlag ist unabhängig von der kleinen Halbachse.
2.2. Versuch zum mathematischen Pendel
Im experimentellen Teil wurde sich aus zeitlichen Gründen auf das mathematische Pendel beschränkt.
Nicht nur das Anfertigen von Evoluten wäre andererseits sehr aufwendig, sondern bei der Zykloiden- bzw. Ellipsenschwingung würden sich auch größere Fehlerquellen erschließen. Hierzu gehört die Schwierigkeit, das Pendel genau an die Evolute schwingen zu lassen, da schon nach wenigen Schwingungen das Pendel die senkrechte Ebene verlässt. Außerdem treten beim Anschwingen und im Lager Impuls- bzw. Reibungskräfte auf, die bei großen Amplituden das jeweilige Pendel zum mathematischen Pendel werden lassen.
Letzteres kann daher als Teil für das Ganze betrachtet werden.
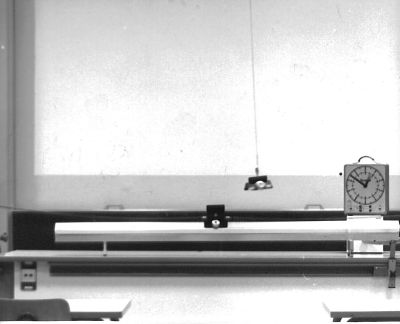
2.2.1. Versuchsaufbau
Zwei meterlange Stangen werden mit einer dritten und vier Muffen verbunden und symmetrisch durch zwei Deckenhaken geschoben. In der Mitte wird zusätzlich ein Winkelmesser und das Lager für den Pendelfaden von 1,60 m Länge befestigt.
Eine Luftkissenfahrbahn wird parallel dazu auf dem Labortisch so platziert, dass ihre Mitte sich senkrecht unter der Spitze des Winkelmessers befindet.
Ein auf der Mitte platzierter Fahrbahnwagen von 0,2 kg Masse wird durch zwei Federn so eingespannt, dass zwischen der Einspannung am Ende des Labortisches und des Wagens eine Direktionsgröße von 2 N/m herrscht.
Eine Stoppuhr wird griffbereit von der Ausgangshöhe des Pendels und des Wagens aufgestellt.
Abbildungen zum Versuch befinden sich im Anhang. Dort sind auch alle verwendeten Geräte aufgeführt.
2.2.2. Versuchsablauf und Ergebnisse
Zuerst wurde sich von der Unabhängigkeit der Periodendauer von der Pendelmasse überzeugt, indem einmal eine ca. 5 kg schwere Kugel, ein anderes Mal der auf 1 kg Masse beschwerte Fahrbahnwagen am Pendelfaden befestigt wurden. Der Unterschied der gemessenen Periodendauern betrug eine hundertstel Sekunde auf jede der zehn Perioden.
Bei der Simulation des mathematischen Pendels durch den harmonischen Oszillator betrug die Zeitdifferenz pro Schwingung 0,6 s (Hin- und Hergang) bei zehn Schwingungen und 60° maximaler Auslenkung des Pendels.
Zur Berechnung der Masse des harmonischen Oszillators wurde die Formel verwandt:\[m = \frac{{2lD}}{{\cos \left( {{\textstyle{{{\varphi _0}} \over 2}}} \right)g}}.\]Letztere kann direkt aus den Periodendauern für die beiden Systeme ermittelt werden.
Hierbei ist die Direktionsgröße \(D_{0}\) für den Oszillator das Doppelte der gleichgroßen Federkonstanten der verwendeten Zugfedern. Die Periodendauer des Oszillators ist daher:\[T = 2\pi \sqrt {\frac{m}{{2D}}} \,(4).\]Die oben errechnete Periodendauer des mathematischen Pendels ist:\[T = 2\pi \sqrt {\frac{l}{{\cos \left( {{\textstyle{{{\varphi _0}} \over 2}}} \right)g}}} .\]Die Dämpfung des Pendels bei einer Auslenkung von 60° betrug 1°, die des Oszillators 0,01 m bei einer Auslenkung von 0,9 m.
Die Messwerte für Ausschläge des mathematischen Pendels von 0° bis 90° sind in Tab. 1 im Anhang aufgeführt.
2.3. Fehlerrechnungen
Die Periodendauer des mathematischen Pendels wurde bisher über das elliptische Integral\[\int\limits_0^{{\textstyle{\pi \over 2}}} {\frac{{d\phi }}{{\sqrt {1 – {k^2}{{\sin }^2}\phi } }}} \,\]mit\[\,k = \sin \left( {{\textstyle{{{\varphi _0}} \over 2}}} \right)\,\]angegeben (2):\[T = 2\pi \sqrt {{\textstyle{l \over g}}\left( {1 + {{\left( {{\textstyle{1 \over 2}}} \right)}^2}{k^2} + {{\left( {{\textstyle{{1 \cdot 3} \over {2 \cdot 4}}}} \right)}^2}{k^4} + {{\left( {{\textstyle{{1 \cdot 3 \cdot 5} \over {2 \cdot 4 \cdot 6}}}} \right)}^2}{k^6} + …} \right)} .\]Um einen direkten Vergleich mit der neuen Formel für die Periodendauer:\[T = 2\pi \sqrt {\frac{l}{{\cos \left( {{\textstyle{{{\varphi _0}} \over 2}}} \right)g}}} .\]anstellen zu können, wird der Funktionswert\[f({\varphi _0}) = \sqrt {\frac{1}{{\cos \left( {{\textstyle{{{\varphi _0}} \over 2}}} \right)}}} \]mit Hilfe der Reihe bei \(|x| < 1\):\[{(1 + x)^p} = 1 + px + \frac{{p(p – 1){x^2}}}{{1 \cdot 2}} + \frac{{p(p – 1)(p – 2){x^3}}}{{1 \cdot 2 \cdot 3}} + …\,\,(2)\]und der Beziehung:\[f({\varphi _0}) = \frac{1}{{\sqrt[{4}]{{1 – {{\sin }^2}\left( {{\textstyle{{{\varphi _0}} \over 2}}} \right)}}}}\]bei\[x = – {\sin ^2}\left( {{\textstyle{{{\varphi _0}} \over 2}}} \right) = – {k^2}\]in die Vergleichsreihe:\[1 + {\left( {{\textstyle{k \over 2}}} \right)^2} + {\left( {{\textstyle{{1 \cdot 5} \over {1 \cdot 2}}}} \right)^2}{\left( {{\textstyle{k \over 2}}} \right)^4} + {\left( {{\textstyle{{1 \cdot 5 \cdot 9} \over {1 \cdot 2 \cdot 3}}}} \right)^2}{\left( {{\textstyle{k \over 2}}} \right)^6} + …\]umgewandelt.
Hieraus ergibt sich, dass die beiden Reihen bis zum ersten quadratischen Glied übereinstimmen.
Teilt man die alte durch die neue Reihe und subtrahiert 1, so ergibt sich die dem Betrag nach kleinere Reihe des relativen Fehlers: \[{\textstyle{1 \over {64}}}{k^4} + {\textstyle{1 \over {64}}}{k^6} + {\textstyle{{231} \over {16384}}}{k^8} + …\,\,.\]Dividiert man umgekehrt bei gleicher Subtraktion, so ist der relative Fehler größer:\[{\textstyle{1 \over {64}}}{k^4} + {\textstyle{1 \over {64}}}{k^6} + {\textstyle{{235} \over {16384}}}{k^8} + …\,\,.\]Die Reihe des absoluten Fehlers ergibt sich durch Subtraktion der alten von der neuen Reihe:\[{\textstyle{1 \over {64}}}{k^4} + {\textstyle{5 \over {256}}}{k^6} + {\textstyle{{335} \over {16384}}}{k^8} + …\,\,.\]Die Werte für ausgesuchte Winkel von 0° bis 90° aller hier aufgeführten Reihen sind im Anhang in Tabellen festgehalten.
2.4. Diskussion
An dieser Stelle soll einmal über die in der Formel:\[\,T = 2\pi \sqrt {\frac{{\sqrt {2lh} }}{a}} \]auftretenden Proportionalitäten nachgedacht werden.
Zuerst ist festzuhalten, dass der Direktionsweg \(s\) zu der Beschleunigung \(a\) der rücktreibenden Kraft \(F_{R}\) nicht proportional ist, sondern der in \(a\) enthaltene Funktionswert \(f(\varphi_{0})\) berücksichtigt werden muss.
Die Länge der Schwingungsbahn wird über den Direktionsweg angeglichen:
Wenn die Ausgangshöhe \(h\) sehr klein ist, wird der zurückzulegende Weg auf der Schwingungsbahn in \(y\)-Richtung und damit auch die Periodendauer kleiner.
Ist die Schwingungsbahn außerdem noch sehr flach, tritt der geringen Ausgangshöhe eine große Pendellänge gegenüber, sodass man für die Länge des Direktionsweges ein Mittelmaß erhält, wie es besonders deutlich bei maximalen Amplituden des Ellipsenpendels zum Vorschein kommt.
Bei stark gekrümmten Schwingungsbahnen und großen Ausgangshöhen wie beim mathematischen Pendel ist die Periodendauer relativ größer.
In der unmittelbaren Nähe der Ruhelage heben sich die Zahlenwerte von Direktionsweg und Beschleunigung auf, sodass der Direktionsweg zur Länge \(l\) des Pendels und die Beschleunigung zur Normfallbeschleunigung \(g\) wird.
In der Ruhelage selbst ist die Periodendauer streng genommen nicht definiert, weil dort die Ausgangshöhe \(h\) und die Beschleunigung \(a\) Null werden.
Je größer die Beschleunigung \(a\) ist, desto kleiner ist die Periodendauer, anderenfalls liegen umgekehrte Verhältnisse vor.
Diese Erkenntnisse konnten in dem Versuch zum mathematischen Pendel relativ gut bestätigt werden.
3. Schluss
Im Rückblick lässt sich sagen, dass die tatsächliche Vorgangsweise mit der in dieser aus Übersichtlichkeitsgründen angeführten nicht vollständig übereinstimmt.
So wurde erst das Problem des mathematischen Pendels gelöst und dann eine allgemeine Problemlösung aufgestellt. Alle Periodendauern wurden ohne Kenntnis der in der entsprechenden Literatur angegebenen Periodendauern berechnet, deren Einsicht wie der Versuch erst Wochen später erfolgte.
Der Rechenweg konnte in der Tat stark vereinfacht und in Bezug auf die Genauigkeit zu dem alten Verfahren brauchte die Fehlergrenze von 0,01 bzw. ein Prozent nicht überschritten werden.
Hierbei konnte das Ellipsenpendel nicht miteinbezogen werden, da über dessen Periodendauer keine Literaturangaben gefunden werden konnten.
Höchstwahrscheinlich wird sich die Fehlergrenze jedoch nach oben verlagern, da das mathematische Pendel als Spezialfall des Ellipsenpendels, dessen Periodendauer bei gleich langen Halbachsen in die des mathematischen Pendels überführt werden kann, schon eine Abweichung von knapp ein Prozent bei maximaler Amplitude in Bezug auf seine Periodendauer besitzt.
Die Widerspruchslosigkeit der Periodendauer des Zykloidenpendels zu den Literaturangaben ist jedoch gegeben.
3.1. Kritische Würdigung der Arbeit
Zweifelsohne ist das Evolutenproblem noch nicht vollständig gelöst. Wenn man nicht mehr die Pendellänge in Ruhelage voraussetzt, muss unter Umständen doch wieder auf Verfahren der Infinitesimalrechnung und Reihenentwicklung zurückgegriffen werden, um eine größere Genauigkeit zu erreichen.
Dazu steht jedoch einerseits das mathematische Pendel, andererseits das Zykloidenpendel im Widerspruch.
Bei ersterem fehlt eine ausgeprägte Evolute trotz Abweichung, bei letzterem existiert keine Abweichung trotz des Vorhandenseins einer Evolute.
Somit muss das neue Verfahren als eigenständig gelten.
Eine genauere Klärung des Sachverhalts würden die in dieser Arbeit leider fehlenden Messungen zu weiteren Periodendauern als der des mathematischen Pendels liefern. Hierbei sind allerdings sehr hohe Anforderungen an die Messgenauigkeit und den Ablauf der Versuche zu stellen.
Insgesamt gesehen erfordert das in dieser Arbeit entwickelte Verfahren zwar eine gewisse Umstellung in der Denkweise, dennoch sollte es aufgrund der erzielten guten Ergebnisse in der Physik seine Anwendung finden können.
4. Anhang
Abbildungen

Abb. 1

Abb. 2

Abb. 3
Alle Konstruktionen erfolgten mit Hilfe von (9).
Nebenrechnungen
Für den Krümmungsradius gilt die allgemeine Formel (3):\[\rho = \frac{{{{\left( {{{\dot x}^2} + {{\dot y}^2}} \right)}^{{\textstyle{3 \over 2}}}}}}{{\dot x\ddot y – \dot y\ddot x}}.\]Die gemeine Zykloide hat die Parametergleichung (2):\[x = a (\Phi – \text{sin}\,(\Phi)) \text{ und } y = a (\text{cos}(\Phi) – 1).\]Für\[{\left( {{{\dot x}^2} + {{\dot y}^2}} \right)^{{\textstyle{3 \over 2}}}}\]kann man daher\[{\left( {{a^2} – 2\cos \,\phi \,{a^2} + {{\cos }^2}\phi \,{a^2} + {{\sin }^2}\phi \,{a^2}} \right)^{{\textstyle{3 \over 2}}}} = {\left( {2{a^2} – 2\cos \phi \,{a^2}} \right)^{{\textstyle{3 \over 2}}}}\]schreiben. Mit\[\dot x\ddot y – \dot y\ddot x = (a – \cos \,\phi \,a)( – \cos \,\phi \,a) – ( – \sin \,\phi \,a)\sin \,\phi \,a = {a^2} – \cos \,\phi \,{a^2}\]gilt somit für den Krümmungsradius\[\rho = 2a\sqrt {2(1 – \cos \,\phi )} = 4\,a\,\sin \left( {{\textstyle{\phi \over 2}}} \right).\]Schreibt man bei der Ellipse vorübergehend \(x = \text{sin}\,(\varphi) a\) und\[y = – b\sqrt {1 – {\textstyle{{{x^2}} \over {{a^2}}}}} = – \cos \,\varphi \,\,b,\]so ergibt sich:\[\dot x\ddot y – \dot y\ddot x = \cos \,\varphi \,\,a(\cos \,\varphi \,\,b) – \sin \,\varphi \,\,b( – \sin \,\varphi \,\,a) = ab.\]Damit ist der Krümmungsradius:\[\rho = \frac{{{{\left( {{{\cos }^2}\varphi \,\,{a^2} + {{\sin }^2}\varphi \,\,{b^2}} \right)}^{{\textstyle{3 \over 2}}}}}}{{ab}}.\]Hebt man die Umwandlung wieder auf, erhält man nach Erweiterung des Bruches mit \(a^{3}\) für \(\rho\):\[\rho = \frac{{{{\left( {{a^4} – {a^2}{x^2} + {b^2}{x^2}} \right)}^{{\textstyle{3 \over 2}}}}}}{{{a^4}b}}.\]Die Evolute der gemeinen Zykloide ist ebenfalls eine Zykloide mit gleichem \(a\) (5).
Für die Evolute der Ellipse gilt jedoch (6):\[\xi = \frac{{({a^2} – {b^2}){{\cos }^3}t}}{a}\]und\[\,\eta = \frac{{({a^2} – {b^2}){{\sin }^3}t}}{b}\]mit \(x = a \text{ cos}(t)\) und \(y = b \text{ sin}\,(t)\).
Um die Tangentialbeschleunigung \(b_{t}\) der Ellipse berechnen zu können, sind folgende Vorüberlegungen notwendig:\[\tan \gamma = \frac{{\sqrt {{a^2} – {x^2}} }}{x} = \frac{q}{{\sqrt {{a^2} – {x^2}} }}.\]Daraus folgt direkt:\[q = \frac{{{a^2} – {x^2}}}{x}.\]Für\[\cos \,\beta = \frac{y}{{\sqrt {{q^2} + {y^2}} }} = \frac{y}{{{{\sqrt {{{\left( {\frac{{{a^2} – {x^2}}}{x}} \right)}^2} + {y^2}} }^{}}}}\]kann man nach Erweitern mit\[\frac{{ax}}{{\sqrt {{a^2} – {x^2}} }}\]schreiben:\[\cos \,\beta = \frac{{bx}}{{\sqrt {{a^4} – {a^2}{x^2} + {b^2}{x^2}} }}.\]Um die Formel für die Periodendauer des Ellipsenpendels:\[T = 2\pi \sqrt {\frac{{\sqrt {{a^4} – {a^2}{x^2} + {b^2}{x^2}} \sqrt {2a\left( {a – \sqrt {{a^2} – {x^2}} } \right)} }}{{bxg}}} \]in die des mathematischen Pendels umzuwandeln, muss \(x = \text{sin}\,(\varphi_{0}) a\) und \(a = b = 1\) gesetzt werden. Somit gilt:\[T = 2\pi \sqrt {\frac{{{a^2}\sqrt {2\left( {1 – \sqrt {1 – \frac{{{x^2}}}{{{a^2}}}} } \right)} }}{{xg}}} = 2\pi \sqrt {\frac{{l\sqrt {2(1 – \cos \,{\varphi _0})} }}{{\sin \,{\varphi _0}\,\,g}}} .\]Daher ist schließlich:\[T = 2\pi \sqrt {\frac{l}{{\cos \left( {{\textstyle{{{\varphi _0}} \over 2}}} \right)g}}} .\]
Versuchsgeräte
| 2 | Tischklemmen für Labortisch mit zwei Halterungen für die Federn |
| 2 | 1 m lange Zugfedern mit einer Federkonstanten von ca. 2 N/m und einem Durchmesser von ca. 0,01 m |
| 1 | 2 m lange Luftkissenbahn mit Luftregler |
| 2 | Fahrbahnwagen mit Blende und Außenhaken von je 0,2 kg Masse |
| 1 | Kugelmasse von ca. 5 kg Masse |
| 1 | Pendelfaden von höchstens 1,60 m Länge |
| 1 | Stoppuhr |
| 2 | Deckenhaken |
| 1 | bis zu 2 m ausziehbarer Ständer mit Halterung |
| 7 | Muffen |
| 7 | Stangen mit zweimal 1 m, einmal 0,6 m, zweimal 0,5 m, einmal 0,1 m und einmal 0,2 m Länge als Winkelstange |
| 1 | Klemme für Winkelmesser mit Hölzchen |
| 1 | Winkelmesser |
| 1 | Klebeband |
sowie diverse Auflagegewichte
Tabellen
Tab. 1
| \(\varphi_{0}\)/Grad | \(T_{exp}\)/s | \(T_{thn}\)/s | \(T_{tha}\)/s | \(\Delta T_{an}\)/% | \(\Delta T_{aa}\)/% |
| 90 | 2,95 | 3,02 | 3,00 | 2,26 | 1,52 |
| 80 | 2.87 | 2,90 | 2,89 | 1,02 | 0,58 |
| 70 | 2,78 | 2,80 | 2,80 | 0,86 | 0,61 |
| 60 | 2,72 | 2,73 | 2,72 | 0,26 | 0,13 |
| 50 | 2,65 | 2,67 | 2,66 | 0,60 | 0,54 |
| 40 | 2,61 | 2,62 | 2,62 | 0,31 | 0,29 |
| 30 | 2,58 | 2,58 | 2,58 | 0,09 | 0,08 |
| 20 | 2,55 | 2,56 | 2,56 | 0,29 | 0,29 |
| 10 | 2,52 | 2,54 | 2,54 | 0,90 | 0,90 |
| 5 | 2,51 | 2,54 | 2,54 | 1,15 | 1,15 |
\(T_{exp} =\) experimentell ermittelte Periodendauer (Durchschnittswerte)
\(T_{thn} =\) theoretische Periodendauer nach dem neuen Verfahren
\(T_{tha} =\) theoretische Periodendauer nach dem alten Verfahren
\(\Delta T_{an} =\) absolute Differenz von \(T_{exp}\) und \(T_{thn}\) mit \(T_{thn}\) als Bezugswert
\(\Delta T_{aa} =\) absolute Differenz von \(T_{exp}\) und \(T_{tha}\) mit \(T_{tha}\) als Bezugswert
Hierbei sind:
l = 1,60 m
g = 9,80665 m/s\({}^{2}\)
Tab. 2
| \(\varphi_{0}\)/Grad | \(f(T_{0})_{n}\) | \(f(T_{0})_{a}\) | \(\Delta f(T_{0})_{rkl}\) | \(\Delta f(T_{0})_{rgr}\) | \(\Delta f(T_{0})_{a}\) |
| 90 | 1,18921 | 1,18034 | 0,74558 | 0,75118 | 0,88665 |
| 80 | 1,14254 | 1,13749 | 0,44214 | 0,44411 | 0,50517 |
| 70 | 1,10489 | 1,10214 | 0,24815 | 0,24877 | 0,27418 |
| 60 | 1,07457 | 1,07318 | 0,12916 | 0,12933 | 0,13879 |
| 50 | 1,05042 | 1,04978 | 0,06045 | 0,06049 | 0,06350 |
| 40 | 1,03159 | 1,03134 | 0,02418 | 0,02418 | 0,02494 |
| 30 | 1,01748 | 1,01741 | 8·10\({}^{-3}\) | 8·10\({}^{-3}\) | 8·10\({}^{-3}\) |
| 20 | 1,00768 | 1,00766 | 1·10\({}^{-3}\) | 1·10\({}^{-3}\) | 1·10\({}^{-3}\) |
| 10 | 1,00191 | 1,00191 | 1·10\({}^{-4}\) | 1·10\({}^{-4}\) | 1·10\({}^{-4}\) |
| 5 | 1,00048 | 1,00048 | 6·10\({}^{-6}\) | 6·10\({}^{-6}\) | 6·10\({}^{-6}\) |
| 4 | 1,00030 | 1,00030 | 3·10\({}^{-6}\) | 2·10\({}^{-6}\) | 2·10\({}^{-6}\) |
| 3 | 1,00017 | 1,00017 | 8·10\({}^{-7}\) | 7·10\({}^{-7}\) | 8·10\({}^{-7}\) |
| 2 | 1,00008 | 1,00008 | 3·10\({}^{-7}\) | 2·10\({}^{-7}\) | 2·10\({}^{-7}\) |
| 1 | 1,00002 | 1,00002 | 2·10\({}^{-7}\) | 1·10\({}^{-7}\) | 1·10\({}^{-7}\) |
| 0 | 1,00000 | 1,00000 | 0 | 0 | 0 |
\(f(T_{0})_{n} =\) Funktionswert der Periodendauer des mathematischen Pendels, mit dem die Periodendauer des Zykloidenpendels multipliziert werden muss, nach dem neuen Verfahren
\(f(T_{0})_{a} =\) der gleiche nach dem alten Verfahren
\(\Delta f(T_{0})_{rkl} =\) kleinere relative Differenz der beiden
\(\Delta f(T_{0})_{rgr} =\) größere relative Differenz der beiden
\(\Delta f(T_{0})_{a} =\) absolute Differenz der beiden
Hierbei sind alle \(\Delta f(T_{0})_{x}\) in Prozent angegeben.
5. Literaturverzeichnis
| 1. |
Arnold, Günter Formeln der Mathematik, Hrsg. von H. Netz 3. Auflage, 1977, Carl Hauser, München (9) |
| 2. |
Beyer, William H. (Herausgeber) CRC Handbook of Mathematical Sciences 5. Auflage, 1978, CRC Press Inc., 2255 Palm Beach Lakes Blvd. (8) |
| 3. |
Deutsch, Harri (Herausgeber) Kleine Enzyklopädie Mathematik 2. neubearb. Auflage, 1980, Harri Deutsch, Thun, Frankfurt/M. (3) |
| 4. |
Dorn, Friedrich / Bader, Franz Physik in einem Band (4) und Physik-Oberstufe, Band O (1) Neubearb. Ausgabe, 1976, Hermann Schroedel, Hannover |
| 5. |
Fichtenholz, G. M. Differential- und Integralrechnungen 1 dt. Orig.ausg., 1964, VEB Deutscher Verlag der Wissenschaften, Berlin (6) |
| 6. |
Franke, Hermann (Herausgeber) dtv-Lexikon der Physik in 10 Bänden 3. neubearb. und erweit. Auflage, 1970, Deutscher Taschenbuch Verlag, München (5) |
| 7. |
Sieber, Helmut Mathematische Begriffe und Formeln 1. Auflage, 1973, Ernst Klett, Stuttgart (7) |
| 8. |
Spiegel, Murray R. Allgemeine Mechanik dt. Orig.ausg., 1976, McGraw-Hill Inc., Düsseldorf (2) |
Nachtrag:
Heute bin ich natürlich in der Lage die korrekten Periodendauern zu berechnen und den Fehler zu meiner Näherungsformel anzugeben.
Es gilt:\[mg{h_0} = mgh + {\textstyle{1 \over 2}}m\frac{{d{s^2}}}{{d{t^2}}}.\]Mit \(x = x(t)\) und \(y = y(t)\) gilt:\[T = \sqrt {\frac{8}{g}} \int\limits_0^{{s_0}} {\sqrt {\frac{1}{{{h_0} – h}}} ds = \sqrt {\frac{8}{g}} \int\limits_0^{{x_0}} {\sqrt {\frac{{1 + {{y‘}^2}}}{{{y_0} – y}}} } dx} = \sqrt {\frac{8}{g}} \int\limits_0^{{t_0}} {\sqrt {\frac{{{{\dot x}^2} + {{\dot y}^2}}}{{{y_0} – y}}} } dt.\]Die Näherungsformel lautet:\[T=2\pi \sqrt{\frac{\sqrt{2lh}}{a}}=2\pi \sqrt{\frac{\sqrt{2{{\left( 1+{y}'{{(0)}^{2}} \right)}^{\tfrac{3}{2}}}{{y}_{0}}\left( {1+{y}‘}_{0}^{2} \right)}}{g{{{{y}‘}}_{0}}\sqrt{{y}“(0)}}}=2\pi \sqrt{\frac{\sqrt{2{{\left( \dot{x}{{(0)}^{2}}+\dot{y}{{(0)}^{2}} \right)}^{\tfrac{3}{2}}}{{y}_{0}}\left( \dot{x}_{0}^{2}+\dot{y}_{0}^{2} \right)}}{g{{{\dot{y}}}_{0}}\sqrt{\dot{x}(0)\ddot{y}(0)-\dot{y}(0)\ddot{x}(0)}}}.\]Mit \(x = a \text{ sin} \,\varphi, y = b – b \text{ cos} \,\varphi\),\[ds = \sqrt {d{x^2} + d{y^2}} = \sqrt {{a^2}{{\cos }^2}\varphi + {b^2}{{\sin }^2}\varphi } \,d\varphi ,\,\,k = \sin \,\left( {{\textstyle{{{\varphi _0}} \over 2}}} \right)\]und\[{\varepsilon ^2} = \frac{{{a^2} – {b^2}}}{{{a^2}}}\]gilt für die Näherungsformel und \(\varepsilon^{2} < 1\)\[T = \frac{{2\pi a\sqrt[{4}]{{1 – {\varepsilon ^2}{{\sin }^2}{\varphi _0}}}}}{{\sqrt {bg\cos \left( {{\textstyle{{{\varphi _0}} \over 2}}} \right)} }}\]die Reihenentwicklung:\[T = \frac{{2\pi a}}{{\sqrt {bg} }}\left\{ {1 + {\textstyle{1 \over 4}}{k^2} – {\varepsilon ^2}{k^2} + {\textstyle{5 \over {32}}}{k^4} + {\textstyle{3 \over 4}}{\varepsilon ^2}{k^4} – {\textstyle{3 \over 2}}{\varepsilon ^4}{k^4} + \mathcal{O}({k^6})} \right\}.\]Für das Ellipsenpendel gilt exakt\[T = \sqrt {\frac{{8{a^2}}}{{bg}}} \int\limits_0^{{\varphi _0}} {\sqrt {\frac{{1 – {\varepsilon ^2}{{\sin }^2}\varphi }}{{\cos \,\varphi – \cos \,{\varphi _0}}}} } d\varphi\]mit der Reihenentwicklung:\[T = \frac{{2\pi a}}{{\sqrt {bg} }}\left\{ {1 + {\textstyle{1 \over 4}}{k^2} – {\varepsilon ^2}{k^2} + {\textstyle{9 \over {64}}}{k^4} + {\textstyle{3 \over 8}}{\varepsilon ^2}{k^4} – {\textstyle{3 \over 4}}{\varepsilon ^4}{k^4} + \mathcal{O}({k^6})} \right\}.\]Mit dem quadratisch konvergierenden arithmetisch-geometrischen Mittel \(M\left(1,\text{ cos}\left(\frac{\varphi_0}{2}\right)\right)\) ergibt sich noch genauer und für das mathematische Pendel (wegen \(a = b\) bzw. \(\varepsilon = 0\)) exakt:\[T=\frac{2\pi a}{\sqrt{bg}}\left\{\frac{1}{M\left(1,\text{ cos}\left(\frac{\varphi_0}{2}\right)\right)}-\varepsilon^2k^2+\frac{3}{8}\left(\varepsilon^2-2\varepsilon^4\right)k^4+\frac{5}{64}\left(\varepsilon^2+12\varepsilon^4-16\varepsilon^6\right)k^6+\mathcal{O}({\varepsilon^2k}^8)\right\}.\]
© 1983-2023 by Boris Haase